Inverse Kinematics
Visit Repo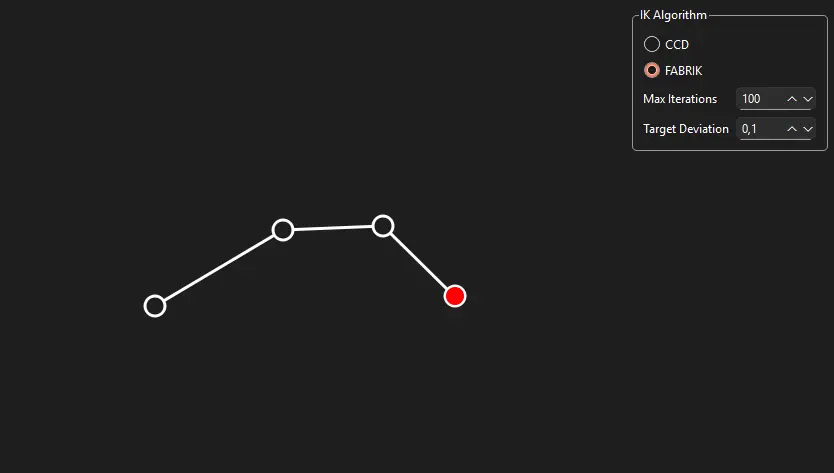
Overview
This project implements two popular Inverse Kinematics (IK) algorithms in C++ and visualizes them using Qt. Inverse Kinematics are commonly used in Robotics and Computer Graphics to place an end-effector such as a robotic hand or a character’s foot on a desired target location. To achieve this, the entire bone chain needs to be adjusted dynamically.
The project includes implementations of the following IK algorithms:
- Cyclic Coordinate Descent (CCD)
- Forward and Backward Reaching Inverse Kinematics (FABRIK)
Both approaches run in real-time, making them suitable for interactive applications such as games. The included Qt demo provides an interactive visualization of the algorithms in action.